



Robotics Applications
Scientists and engineers crafting autonomous systems rely on MATLAB® and Simulink® for comprehensive simulation and validation across all elements, spanning perception to movement.
- Precise modeling of robotic systems, accounting for intricate elements like sensor nuances and motor vibrations.
- Accurate simulation of robotics, encompassing kinematics, dynamics, and contact features.
- Crafting and fine-tuning high-level autonomy and low-level control mechanisms.
- Synthesizing and scrutinizing sensor data using a comprehensive library of algorithms.
- Step-by-step verification of robot designs or algorithms, progressing from simulation to hardware-in-the-loop (HIL) testing.
- Deployment of algorithms onto robots through ROS or directly onto microcontrollers, FPGAs, PLCs, and GPUs.
Use MATLAB for Robotics and Autonomous Systems


Quick Start Guide
Robotics and Autonomous Systems Humanoids Information
 DOWNLOAD
DOWNLOAD
Design the Hardware Platform
Create a 3D physical model or an electromechanical model of autonomous vehicles, drones, and manipulators for simulation, optimization, and reinforcement learning of control algorithms.
- Import existing 3D models from URDF files or CAD software.
- Make the model physically accurate by implementing dynamics, contacts, hydraulics, and pneumatics.
- Complete the digital twins by adding an electrical diagram layer.

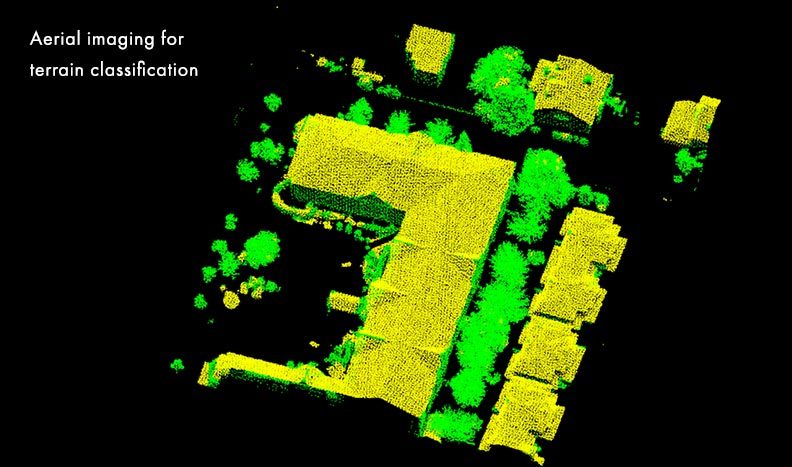
Processing Sensor Data
Implement sensor data processing algorithms with powerful toolboxes in MATLAB and Simulink.
- Connect to sensors through ROS, Serial, and other types of protocols.
- Visualize data from cameras, sonar, LiDAR, GPS, and IMUs. Automate common sensor processing tasks such as sensor fusion, filtering, geometric transformation, segmentation, and registration.
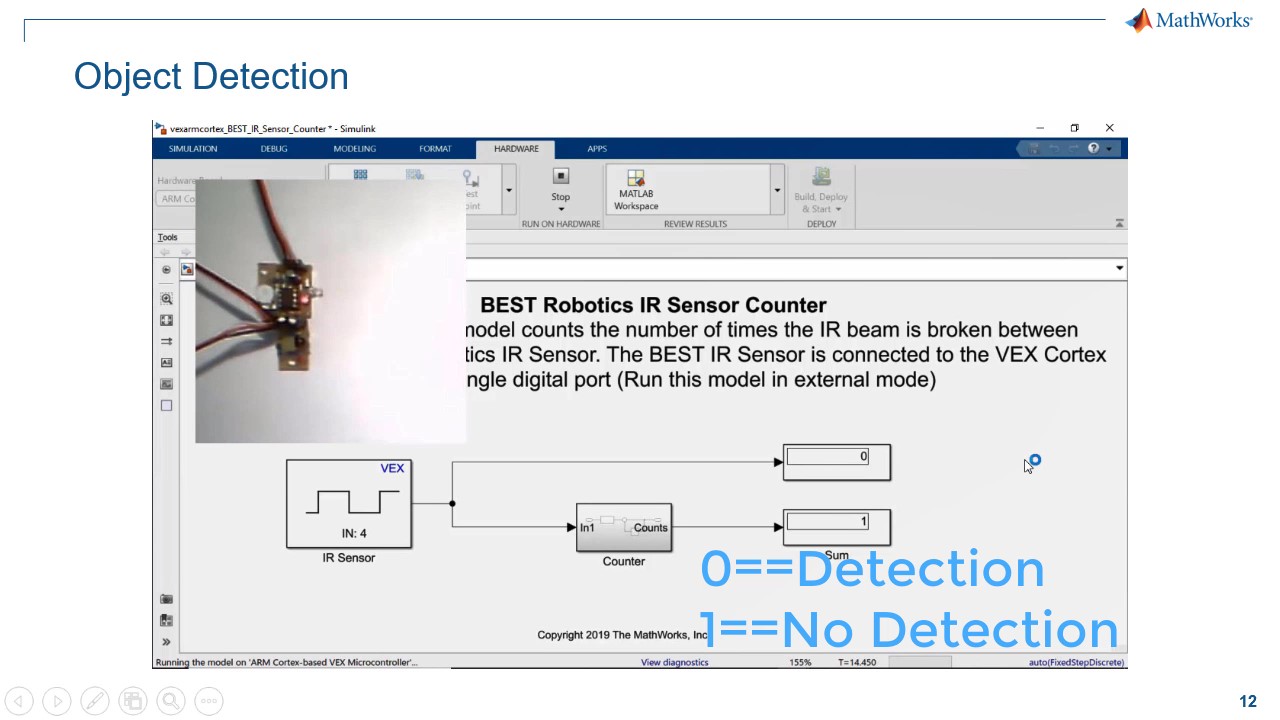
Perceiving the Environment
Use built-in interactive MATLAB apps to implement algorithms for object detection and tracking, localization and mapping.
- Experiment and evaluate different neural networks for image classification, regression, and feature detection.
- Automatically convert algorithms into C/C++, fixed-point, HDL, or CUDA® code for deployment to hardware.


Planning and Decision Making
Use an actively maintained algorithm library to implement 2D or 3D path planning for a robot that is either defined as a point mass or a system with kinematic and dynamic constraints. Perform task planning with Stateflow®, defining the conditions and actions needed for decision-making in real-time.
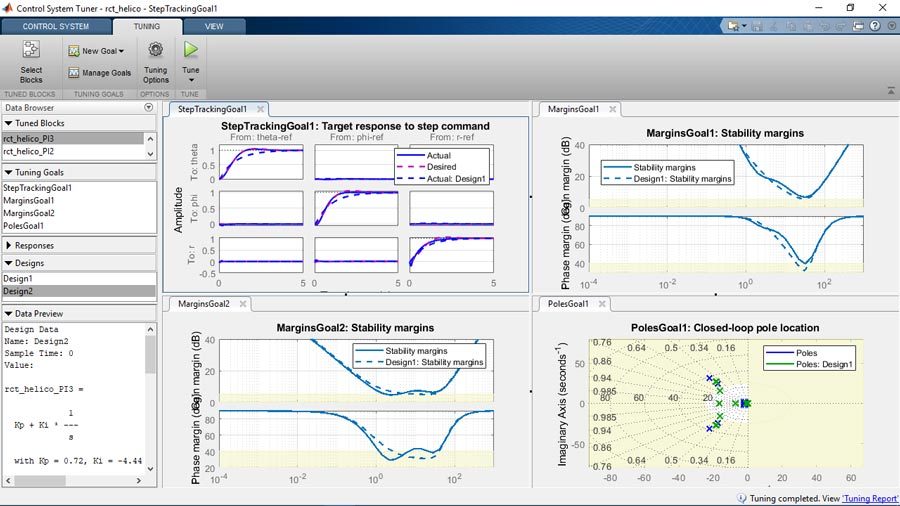
Designing Control Systems
Use built-in interactive MATLAB apps to analyze the behavior of complex systems in time and frequency domains. Design feedback controllers in the deterministic approach, optimization approach, or reinforcement learning approach.
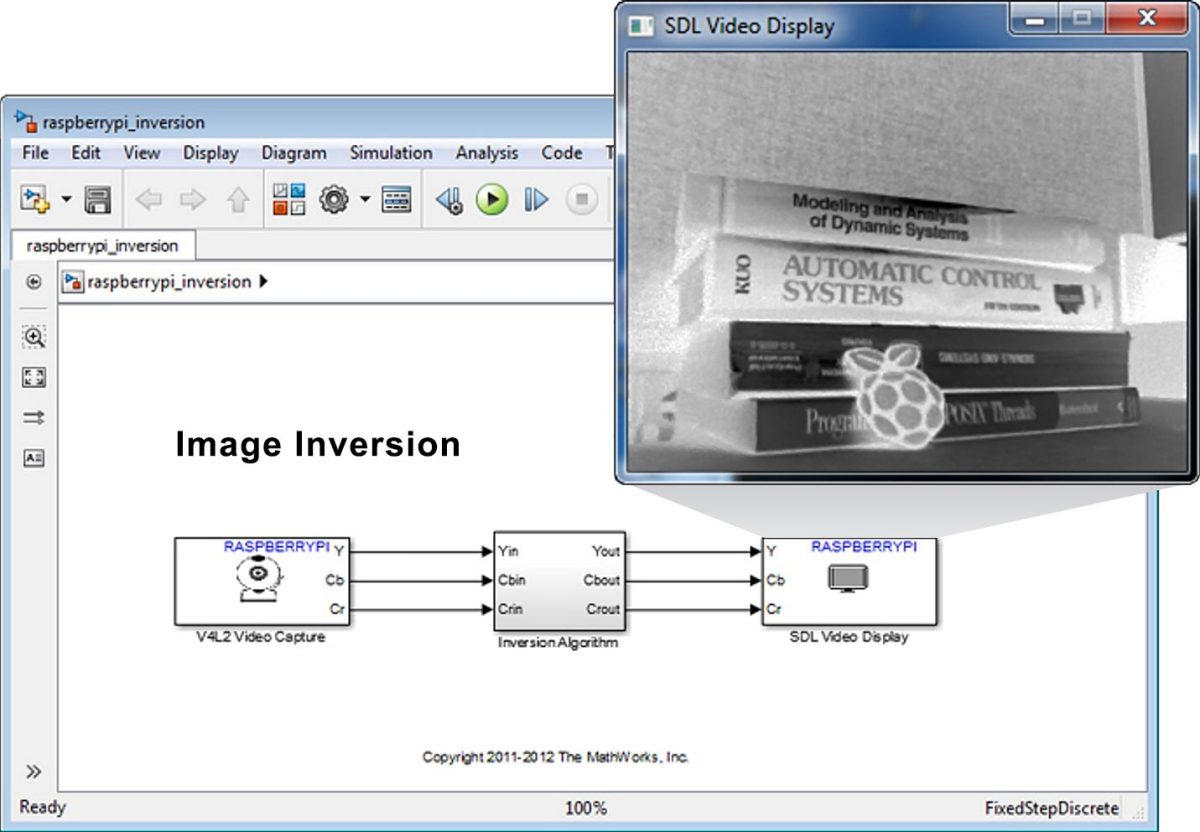
Communicating with Platforms and Targets
Deploy autonomous algorithms to ROS-based systems and microcontrollers such as Arduino® and Raspberry Pi™. Communicate with embedded targets via protocols, including CAN, EtherCAT®, 802.11™, TCP/IP, UDP, I2C, SPI, MODBUS®, and Bluetooth®.
Contact Us
If you have any enquiry, please do not hesitate to contact us.
Contact Us
